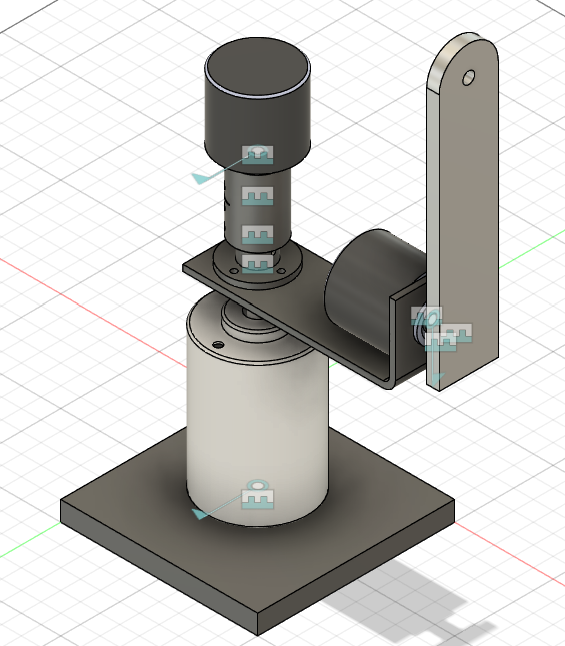
This project is still a work in progress but tentatively follows this current design.
The Furuta Pendulum is an inverted rotary pendulum and gets its name from one of its inventors, Katsuhisa Furuta. The Furuta Pendulum is an underactuated system which requires nonlinear controls to take the system from a stable equilibrium position to an unstable equilibrium position.
The main components used in the project are:
- Motor – XD 3420 (Long shaft version)
- Speed Controller – BTS 7960
- Microcontroller – TMS320f28379d
- Optical Encoder – e38s6g5-600b-g24n
- 12v 3A power supply 8mm to 6mm shaft coupler
- 8mm to 6mm shaft coupler
- 8mm flange coupler
- 6mm flange coupler
- Custom CNC cut links
